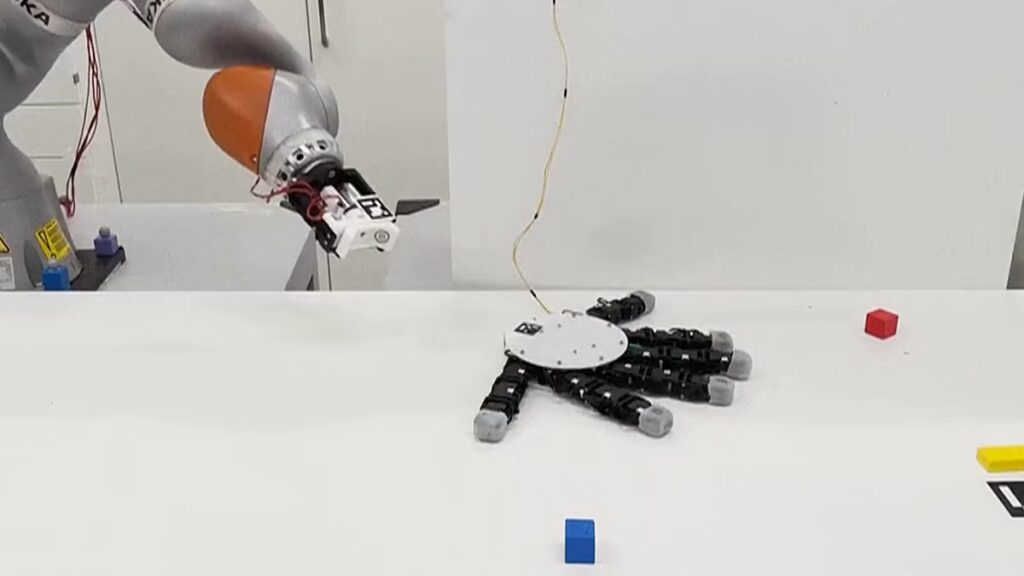
A tesztek során a kéz le tudott válni a karjáról, úgy kúszott, mint egy kis többlábú robot, és egymás után három tárgyat is vissza tudott húzni, mielőtt visszahelyezte volna.
Egy kéz mászkál, levált a karjáról, és látszólag önálló életet él.
Talán ismerősen hangzik az Addams Family vagy a Wednesday rajongói számára, de ez a „Dolog” nem fantázia, hanem technológiai valóság.
A Nature Communications ezen a héten ismertetett robotkéz-kialakítása képes felkúszni, megragadni a normál elérhetetlenségen kívül eső tárgyakat, majd visszacsatlakozni egy robotkarhoz.
A kutatócsoport azt állítja, hogy több mint 30 általános emberi fogótípust képes reprodukálni, és akár két kilogramm súlyú tárgyakat is felemelhet.
A legtöbb robotkezet úgy tervezték, hogy utánozza az emberi kezet.
A kutatócsoport azonban azt állítja, hogy ennek a megközelítésnek korlátai vannak.
„Úgy gondoljuk, hogy az emberi kéz nem tökéletes… Hiányzik a szimmetria a kezünkben, és a kéz csak korlátozott számú feladatot tud végrehajtani a kezünk szerkezete és korlátozottsága miatt” – mondta Kunpeng Yao, a brit Leedsi Egyetem adjunktusa.
„Szóval mi van akkor, ha felszabadítjuk ezeket a korlátokat, és a robotkezet túlmutat az emberi kéz funkcionalitásán, még ügyesebbé tesszük? Azt hiszem, ez az egész ötlet a tervezésünk mögött, és a probléma, amellyel foglalkozni akartunk” – tette hozzá.
A csapat szerint az egyik legfontosabb korlát az, hogy az emberi kéz csak egy hüvelykujjra támaszkodik, és csak az egyik oldalról tud megfogni.
„Miért csak egy hüvelykujjunk van? Mi lenne, ha kettő vagy több lenne, vagy bármelyik ujjunk hüvelykujj lehet?” – kérdezi a társszerző, Aude Billard professzor, a svájci EPFL-től.
„Ha az ujjak mindegyike hüvelykujj vagy hüvelykujj és mutató, akkor sok párod lehet. Ez lehetővé teszi például, hogy csak azzal a két ujjal ragadd meg a dolgokat” – tette hozzá Billard.
A kutatók a kéz két változatát fejlesztették ki, az egyik öt ujjal, a másik hat ujjal.
Mindkettő szimmetrikus kialakítású, amely lehetővé teszi a kézfej mindkét oldaláról való megfogást.
A tesztek során a kéz le tudott válni a karjáról, úgy kúszott, mint egy kis többlábú robot, és egymás után három tárgyat is vissza tudott húzni, mielőtt visszahelyezte volna. Mindezt úgy tudta megtenni, hogy közben megőrizte a biztos fogást.
A csapat szerint a jövőbeli kutatások megvizsgálhatják a technológia alkalmazását szűk helyeken, beleértve a potenciálisan mentési helyzeteket is.
„Mindig van egy szűk hely a gyár belsejében, ahol szükséged van, néha szükséged van a kézre, amely leválhat, és bejuthat valahova, esetleg egy ipari csővezetékre, nagy csővezetékre, hogy a kéz be tudjon menni a csővezetékbe, vagy egy kis csővezetékbe, hogy megkerülhesd” – mondta Xiao Gao, a kínai Wuhan Egyetem Robotics Iskolájának társszerzője.
„Szóval úgy gondolom, hogy ez egy nagyon jó forgatókönyv a használatához.”
Ha többet szeretne megtudni erről a történetről, tekintse meg a fenti videót a médialejátszóban.